













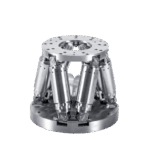
DHEX-100-50 Hexapod
応用シーン
能動アライメント|光ファイバー結合|シリコンフォトニクスウェハ試験|カメラモジュール組立|光学試験|精密アライメント|精密組立|科学研究
能動アライメント|光ファイバー結合|シリコンフォトニクスウェハ試験|カメラモジュール組立|光学試験|精密アライメント|精密組立|科学研究

136mmのコンパクトシャーシ、114.3mmの超低い起動高さで、限られたスペースにも容易に統合可能。
繰り返し位置決め精度は±0.06µmに達し、微小・ナノレベルのアライメントと位置決め要求を満たします。
革新的な機構設計により、運動の「引っかかり」を効果的に防止し、長時間の安定稼働を保証。
並列構造により高い剛性、軽い移動質量、迅速な動的応答を実現し、累積誤差がありません。
| 運動軸 | |
|---|---|
| X行程 | |
| Y行程 | |
| Z行程 | |
| θX行程 | |
| θY行程 | |
| θZ行程 | |
| X最大速度 | |
| Y最大速度 | |
| Z最大速度 | |
| θX最大角速度 | |
| θY最大角速度 | |
| θZ最大角速度 | |
| X最小移動量 | |
| Y最小移動量 | |
| Z最小移動量 | |
| θX最小移動量 | |
| θY最小移動量 | |
| θZ最小移動量 | |
| X単方向繰返し精度 | |
| Y単方向繰返し精度 | |
| Z単方向繰返し精度 | |
| θX単方向繰返し精度 | |
| θY単方向繰返し精度 | |
| θZ単方向繰返し精度 | |
| Xバックラッシュ | |
| Yバックラッシュ | |
| Zバックラッシュ | |
| θXバックラッシュ | |
| θYバックラッシュ | |
| θZバックラッシュ | |
| 最大負荷(ベースプレート任意方向) | |
| 最大負荷(ベースプレート水平) | |
| 停電時保持力(ベースプレート任意方向) | |
| 停電時保持力(ベースプレート水平) | |
| 説明 | 高速はチャレンジ速度であり、低速は最低基準速度です。 長時間にわたり非常に高速での運動を行うと、運動の滑らかさが損なわれる可能性があります。製品の信頼性を最大限に高め、リスクをできるだけ減らすために設定されています。 低速の指標は、対象の使用環境における品質や効率に影響を与えません。 |
"*" は必須項目です
 微信扫一扫
微信扫一扫
"*" は必須項目です